LEGO
Learning to Grasp Anything by Playing with Random Toys
Dantong Niu1,*,
Yuvan Sharma1,*,
Baifeng Shi1,*
Rachel Ding1,
Matteo Gioia2,§,
Haoru Xue1,
Henry Tsai1,
Konstantinos Kallidromitis3,
Anirudh Pai1
Shankar Shastry1,†,
Trevor Darrell1,†,
Jitendra Malik1,†,
Roei Herzig1,†
*Equal contribution †Equal advising §work done while interning at ItalAI
1University of California, Berkeley
2Sapienza University of Rome
3Panasonic
TLDR: Training robots on random toys enables zero-shot grasping of real-world objects.

Grasping Demonstrations for Randomized Toys (Training Set)
Zero-Shot Grasping on Real World Objects (Evaluation Set)
Grasping Demonstrations for Randomized Toys (Training Set)
Zero-Shot Grasping on YCB Real World Objects (Evaluation Set)
Grasping Demonstrations for Randomized Toys (Training Set)
Zero-Shot Grasping on Real World Objects (Evaluation Set)
Detection Pooling
- To learn a policy that generalizes to novel objects from randomized toys, we design the vision encoder to be object-centric using a mechanism called detection pooling.
- Detection pooling ensures that the visual feature focuses on the object to be grasped:
- First, we obtain the object segmentation mask for each frame using SAM 2 (or using ground truth masks in simulation).
- We then use the object mask to set the attention mask in the vision encoder, preventing attention between object and non-object patch tokens.
- This ensures object patch tokens only contain features from the object itself.
- Positional embeddings still allow the encoder to understand the object's location in the scene.
- The final object-centric visual feature is obtained by applying mean pooling on the object patch tokens, which is then fed to the policy model (a standard transformer architecture).
- Empirical results show that detection pooling is crucial for strong zero-shot generalization, compared to other pooling methods (mean or attention pooling) that do not restrict attention within the ViT and only pool the final output tokens (see Results section).
Creating Randomized Robot Toys
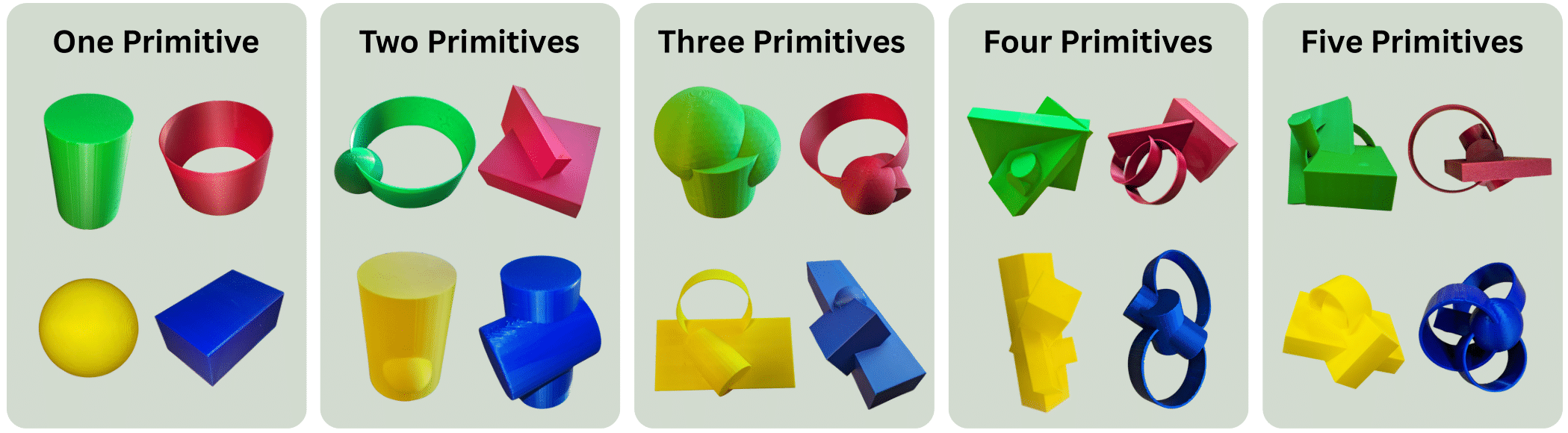
To create randomized toys for learning generalizable grasping skills, we draw inspiration from Cézanne's classic idea that everyday objects can be decomposed into combinations of simple shape primitives. Specifically, we use four basic primitives—cuboids, spheres, cylinders, and rings—and generate randomized toys by selecting up to five primitives per toy and assigning them random positions and orientations, while enforcing intersections to ensure the overall object forms solid structure. Each toy is then assigned one of four colors: red, green, blue, or yellow. For real-world experiments, we 3D print 250 of these toys. Examples of the randomized toys are shown in the figure below.
Real-World Franka DROID Grasping Results
Results of zero-shot grasping in the real-world Franka DROID setting, on 64 objects from the YCB Object Benchmark. Models tuned on toys are trained with a total of 1500 grasping demonstrations across 250 toys. During evaluation, each YCB object is tested 16 times across a predefined 4x4 grid, and results are averaged to get the final success rate. LEGO outperforms large-scale robotic models such as zero-shot π₀-FAST and OpenVLA, and ShapeGrasp, which uses a pre-trained LLM for choosing grasp points, achieving an overall success rate of 67%.Real-World H1-2 + Dexterous Hands Grasping Results
Results of zero-shot grasping in the real-world H1-2 humanoid with dexterous hands setting, on 13 real-world objects. Models were tuned on a total of 500 grasping demonstrations across 250 toys. During evaluation, each object was tested 5 times across a predefined grid, and results were averaged to get the final success rate. LEGO outperforms both large-scale VLA models tested, π₀-FAST and OpenVLA, achieving an overall success rate of 51%.Scaling Ablations
We perform an ablation study in simulation to examine how both the number of unique toys in the training set and the number of grasping demonstrations influence performance. Specifically, we construct six object sets containing 1, 25, 125, 250, 500, and 1000 unique toys, respectively. For each set, we collect 2,500 grasping demonstrations and train our model using varying numbers of demonstrations per set. The results, shown in the left panel of the figure below, indicate that increasing the number of unique objects improves performance, but with diminishing returns. In contrast, the number of demonstrations has a stronger impact on learning generalizable grasping. The right panel of the figure illustrates the results of an ablation study on the size of the model's transformer policy, where we find ViT-B (86M parameters) to achieve the best overall performance.